打造“车-云-路”协同方案,觉非科技实践智能驾驶的“中国路径”「星特写」
发布时间:2020.04

随着国家11部委联合出台《智能汽车创新发展战略》,“车-云-路”协同方案正式成为智能驾驶的“中国路径”。可以预见的是,重数据与强融合的发展方式,将成为“中国路径”的核心策略。
近日,觉非科技CEO李东旻就智能驾驶“中国路径”的演绎与发展在雷锋网做了分享。
1
基于后深度学习的觉非科技方案
清华大学人工智能研究院院长张钹院士提出,整个自动驾驶的落地需要进入后深度学习时代。所谓后深度学习,就是通过“车、云、路协同”的方式,将经验类的,具有较好稳定性、可靠性的数据以及边缘推理算法,再加实时感知数据联合在一起,进行驱动,发展成解释性比较强,可依赖的人工智能技术。
因此,觉非科技希望发展出基于后深度学习时代的内容,把一些稳定性比较高的数据跟实时传感器相融合实现更可靠的自动驾驶。
觉非科技做过一个演示,后深度学习加上高精地图,就能让一辆普通的车辆实现颠覆式变化。
一辆未经任何改装的普通车辆,仅在车辆后视镜下面架一个手机,手机通过USB线连接到后视镜里汽车的CAN总线上。通过这根USB线,即可实现手机控制这辆普通汽车的所有感知过程。这是需要用户花4万到5万才能实现的高级辅助驾驶功能,包括沿车道行驶、高速公路并道等。
从技术角度而言,这是怎么实现的?在手机里面存储数据和感知算法,尤其是融合感知算法。脱离硬件本身,手机里面存储的数据具备了一个零到无穷远的超视距感知能力。然后把实时感知数据加上车道线的高精度地图数据,同时把车辆本身的运行数据(惯导设备、GPS信号)实时状态相融合,能够就实现一个鲁棒性和安全性都非常之高的解决方案。
就像给这辆车绘制了一个看不见的铁轨,让车沿着非常安全稳定的铁轨行使,不受恶意攻击的影响。

在这条路径上,觉非科技与合作伙伴宇通客车一起合作了两项方案。
第一个方案是AR交互系统,部署在一个L4级别的无人驾驶的小巴上。在车内22寸的液晶屏上面,乘客能够清晰地看到车辆是在怎么感知周围环境的。不论是公交车、行人、自行车还是其他的移动物体,都可以准确的在界面上显示出来;同时也会向乘客展示车辆的行进方向、路径规划、目标物体的测距。
第二个方案是双方合作创新的工作模式,面向快速公交车辆实现全场景的融合感知。全场景融合感知,就是在不论刮风下雨还是重度雾霾等异常恶劣天气情况下,快速公交车都能够实现360度无死角的进行感知。
其中会用到很多传感器,基于这套感知硬件,觉非科技把自己核心的技术比如道路的语义分割、图像与激光点云融合在一起,形成一个典型的多传感器融合技术。
多传感器融合能力可以通过摄像头对物体进行识别,也可以通过激光雷达对物体进行测距,但不依赖于某一个传感器硬件。
目前,国内在政策层面已经制定了C-V2X的落地白皮书。到2025年,一半的新车将会具备C-V2X功能。现在每年2000多万新车销售,其中至少一半的车有这个功能,具备巨大的市场潜力。通过觉非科技的路径来改造车,能够实现比较好的车云路协同。
2
觉非科技的车云路协同
觉非的整体车云路协同软硬件一体化架构,是经过实践总结出来的结果。这个架构最上层的部分是基础设施。核心层面包括定位、通讯、路侧设施三个基础设施。
觉非科技的定位,是面向整个智能出行产业打造一个数据引擎, 形成“双轮驱动”的模式。一方面针对运营场景端,通过高精度数字化能力进行赋能。另一方面,针对智能终端,通过车端传感器数据、路端传感器数据与高精地图数据进行有效的时空同步与融合,把知识驱动与数据驱动结合起来,提供可靠、精准的智能化解决方案,能够有效保证自动驾驶车辆的安全性。
觉非科技的数据引擎进入市场以后,解决了自动驾驶产业的很多痛点。比如感知在不完全依赖于激光雷达的前提下,做到激光雷达和摄像头在亚毫秒之间的同步,弥补了单车智能模式的一些天然不足。
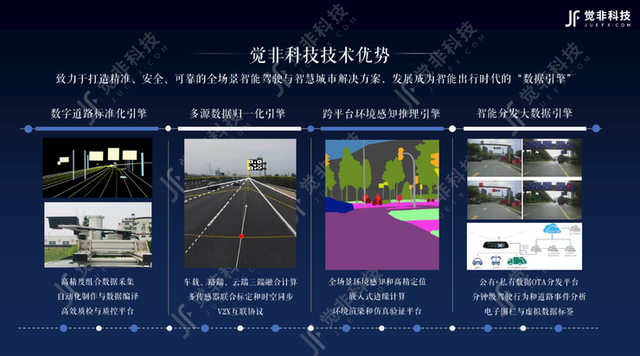
总体来看,觉非科技有4个技术上的优势:数字化的道路引擎、多元数据归一化引擎,跨平台、跨终端的道路推理引擎,以及通过云端跟车端之间建立起来大数据分发引擎。
李东旻认为,从技术到量产落地需要具备的充要条件有四点。
第一点,在产业上一定要有需求,有痛点。过去很多的自动驾驶方案提供的大多是锦上添花的功能。消费者看乘用车的时候,最终还是要看安全。
第二点,在经济层面,不管是技术、硬件还是软件,方案一定要可规模化部署。
第三点,在竞争层面,对于很多创业型公司来说,需要建立自己的竞争优势。互联网时代一直在讲闭环的迭代,就是发布的技术、产品要能够通过客户用户,将反馈和数据收集回来。
最后一点是技术层面,一定要提供高可靠性的解决方案。
3
用中台战略掘金新战场
《智能汽车创新发展战略》中明确设定了:建设国家智能汽车大数据云控基础平台的新目标。这样的数据基础平台,不仅关乎交通的运转效率,同时也关乎未来的交通安全。因此在各国的战略规划中,一直都是重中之重。
实现这一美好愿景的基础,是对各种交通数据的采集、处理,在智能汽车的应用中,还会涉及高精地图、高精定位等系统化数据,可以给自动驾驶系统与车辆,提供更确定性的道路交通指示,帮助其进行更安全、可靠的决策规划。
觉非科技是目前自动驾驶产业中,少有的能提供成熟解决方案的技术创新型公司,致力于成为智能驾驶的“数据引擎”,提供支撑运营场景智能化与数字化的数据引擎中台,也就是依赖对现实道路高精度数字化能力,提供定制化区域的高精地图制图、高精度定位、私有云更新等服务,提供精准、安全、可靠的全场景智能驾驶与智慧城市解决方案,推动整个智慧出行行业的高效发展。
觉非科技的数据引擎有两个特点,第一是跨终端平台的部署便捷性,第二个是与底层硬件解耦的灵活性,这也是作为数据中台的角色而言必须具备的特点。>
而这种“中台思路”,对于产业而言,也将会成为未来的趋势。
据创业邦报道,在技术算法差异性日益缩小的情况下,觉非科技从海量数据端切入,为客户定制化提供了完整的引擎解决方案。
首先是数字道路标准化引擎,该产品依靠高精度组合数据采集道路信息,经过自动化制图与数据编译,以及高效的质检质控,可为客户定制使用;其次是多源数据归一化引擎,该产品将车载、路端、云端三端数据进行融合计算,通过多传感器联合标定达到高精定位时空同步的效果;进而是跨平台环境感知推理引擎,可融合全场景环境感知数据和高精定位数据,通过嵌入式边缘计算能力实现,同时觉非科技可提供环境渲染与仿真验证平台,跨平台适配更多客户,打造行业标准;最后是智能分发大数据引擎,可为客户搭建公有与私有数据回源和分发平台,可进行电子围栏与虚拟数据标签的标定,并实现分钟级驾驶行为和道路事件分析。
从技术与场景上,觉非科技目前已经搭建了基于“车-云-路”模式的软硬件架构,同时一直坚持用多传感器加高精地图的融合计算方法,专注解决自动驾驶车辆的感知与规划两个核心部分。
通过车端传感器数据、路端传感器数据与高精地图数据进行有效的时空同步与融合,把知识驱动与数据驱动结合起来,提供对应的融合感知与规划模块,能够有效保证自动驾驶车辆的安全性及ODD规模化扩展,即“强数据、重融合”的思路。
成立三年,觉非科技团队已有70人规模,研发成员占比70%。目前,公司正携手宇通客车、华为、中国移动、清华大学车辆与运载学院等产业伙伴,深耕技术创新及产品建设,同时已成为Arm人工智能生态联盟委员单位、中国移动5G精准定位联盟成员,与产业伙伴共同推动中国路径“车-云-路”模式下的量产与落地。
合作问询




